Zihang Zhao
Open Menu
Close Menu
Home
Publications
Publications
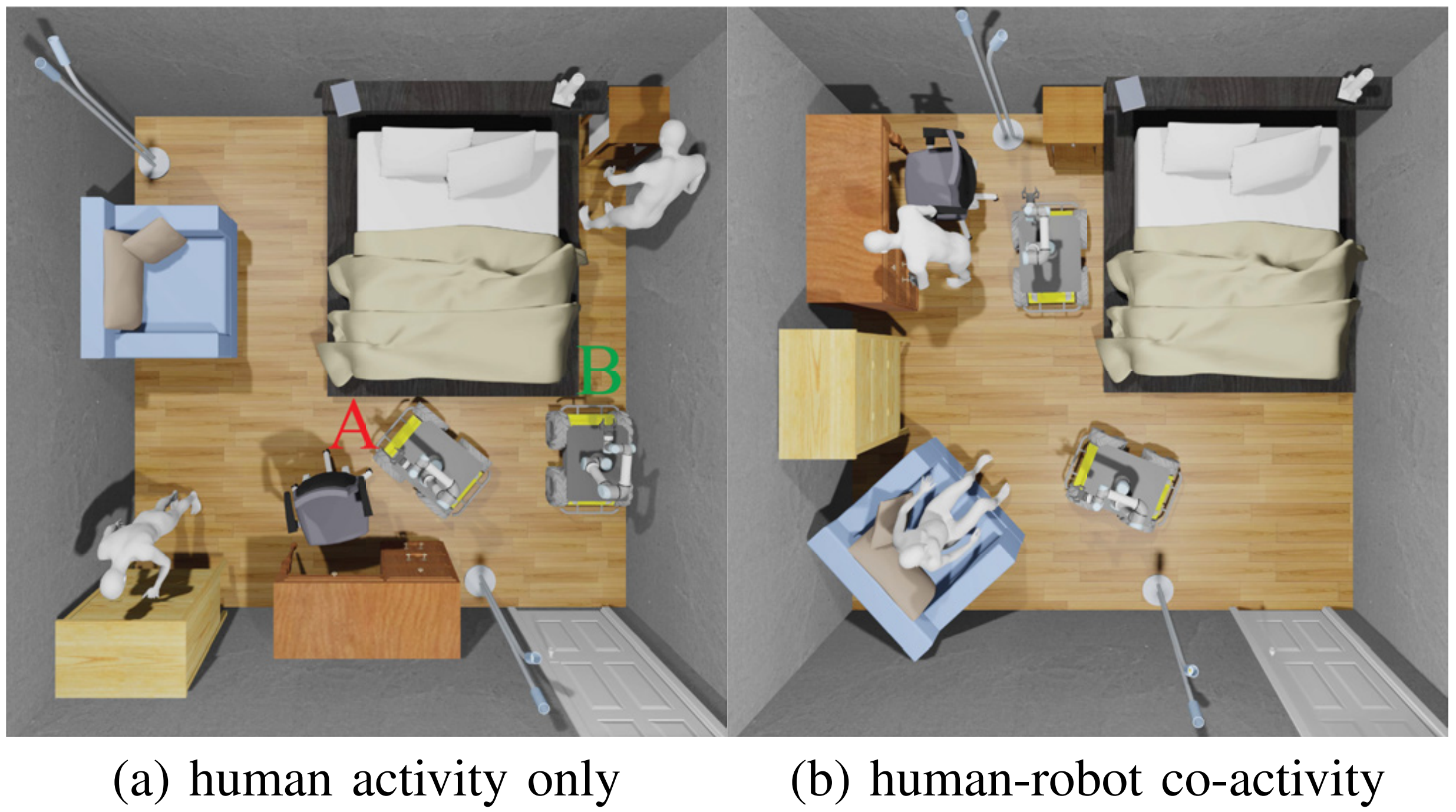
[ICRA23] Rearrange indoor scenes for human-robot co-activity
Weiqi Wang
⚖️
equal contributor
,
Zihang Zhao
⚖️
equal contributor
,
Ziyuan Jiao
⚖️
equal contributor
,
Yixin Zhu
✉️
corresponding author
,
Song-Chun Zhu
,
Hangxin Liu
✉️
corresponding author
Cite
IEEE
ArXiv
pdf
code
video
web
[IROS21] A low-cost robot with autonomous recharge and navigation for weed control in fields with narrow row spacing
Yayun Du
,
Bhrugu Mallajosyula
,
Deming Sun
,
Jingyi Chen
,
Zihang Zhao
,
Mukhlesur Rahman
,
Mohiuddin Quadir
,
Mohammad Khalid Jawed
Cite
IEEE
ArXiv
pdf
« Previous