Zihang Zhao
Open Menu
Close Menu
Home
Publications
Publications
Your browser does not support the video tag.
[ICRA26] Vi-TacMan: Articulated Object Manipulation via Vision and Touch
Accepted
Leiyao Cui
⚖️
equal contributor
,
Zihang Zhao
⚖️✉️
equal contributor, corresponding author
,
Sirui Xie
⚖️
equal contributor
,
Wenhuan Zhang
⚖️
equal contributor
,
Zhi Han
,
Yixin Zhu
✉️
corresponding author
Cite
ArXiv
pdf
code
dataset
video
web
Your browser does not support the video tag.
[arXiv25] TacMan-Turbo: Proactive Tactile Control for Robust and Efficient Articulated Object Manipulation
Zihang Zhao
⚖️
equal contributor
,
Zhenghao Qi
⚖️
equal contributor
,
Yuyang Li
,
Leiyao Cui
,
Zhi Han
✉️
corresponding author
,
Lecheng Ruan
✉️
corresponding author
,
Yixin Zhu
✉️
corresponding author
Cite
ArXiv
pdf
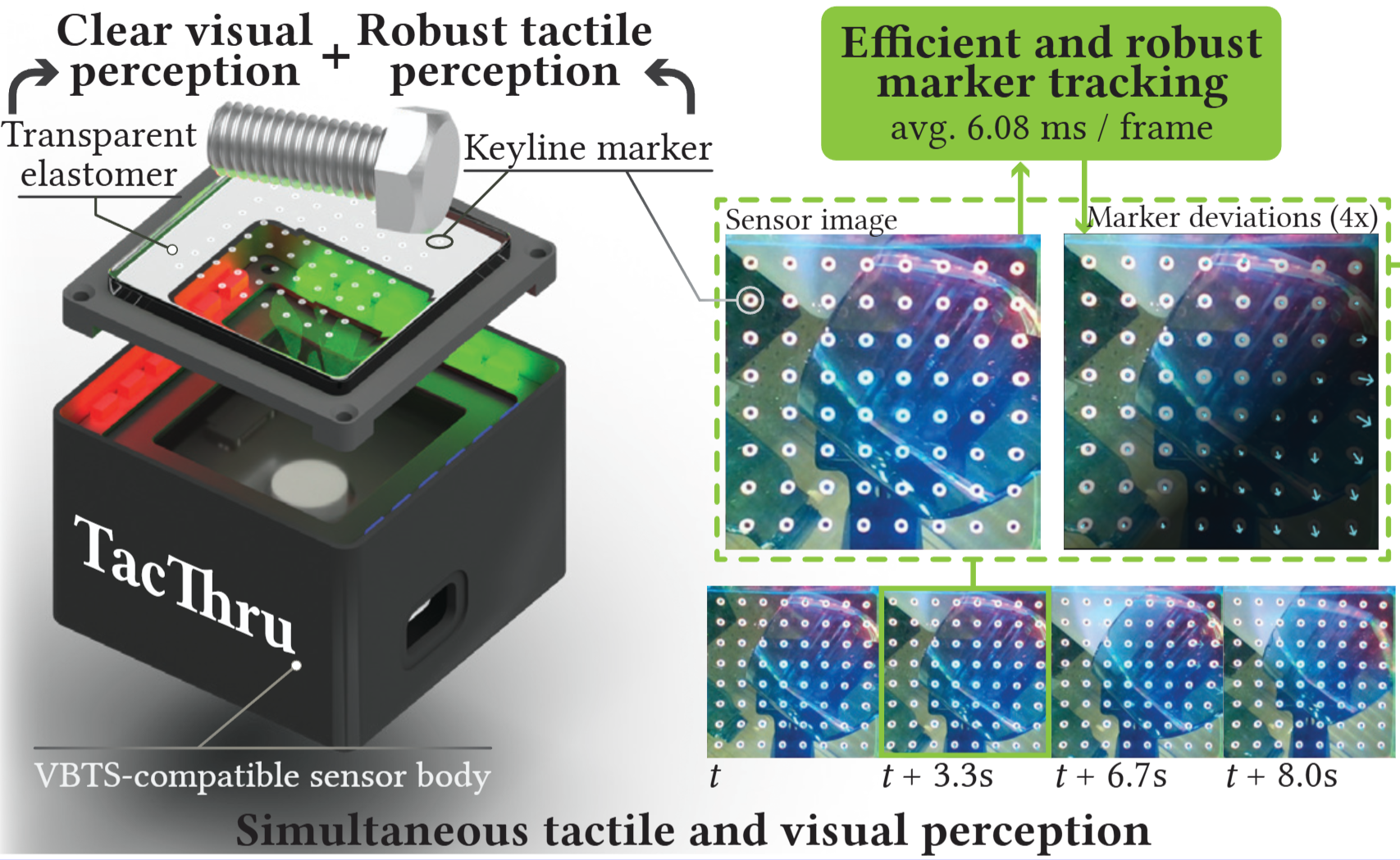
[arXiv25] Simultaneous Tactile-Visual Perception for Learning Multimodal Robot Manipulation
Yuyang Li
⚖️
equal contributor
,
Yinhan Chen
⚖️
equal contributor
,
Zihang Zhao
,
Puhao Li
,
Tengyu Liu
✉️
corresponding author
,
Siyuan Huang
✉️
corresponding author
,
Yixin Zhu
✉️
corresponding author
Cite
ArXiv
pdf
code
video
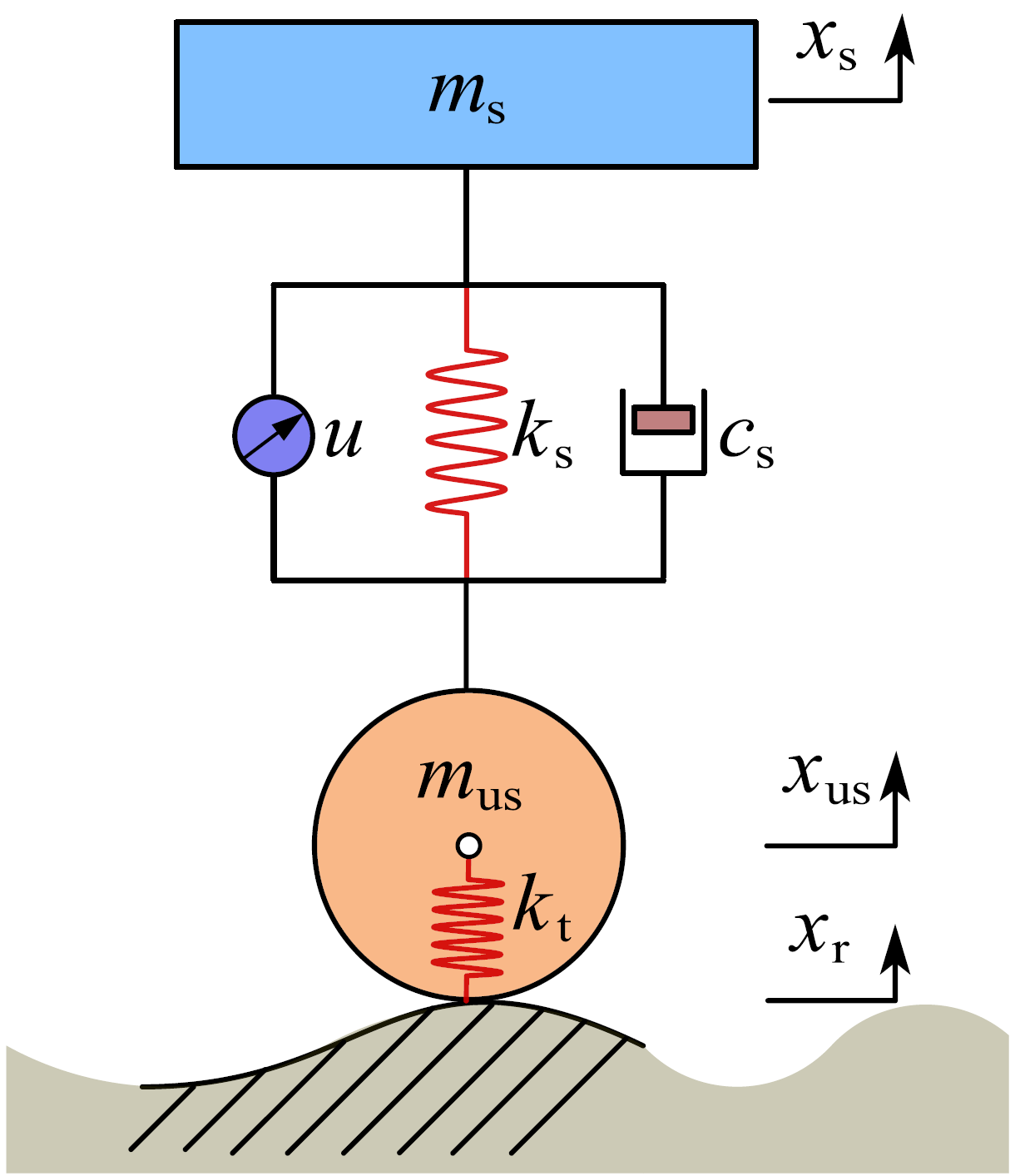
[MMT25] An integrated mechanical-control design methodology for the active suspension of lunar crewed vehicles
Haibo Gao
,
Yu Wang
,
Zhen Liu
✉️
corresponding author
,
Runze Yuan
✉️
corresponding author
,
Renchao Lu
,
Zihang Zhao
Cite
ELSEVIER
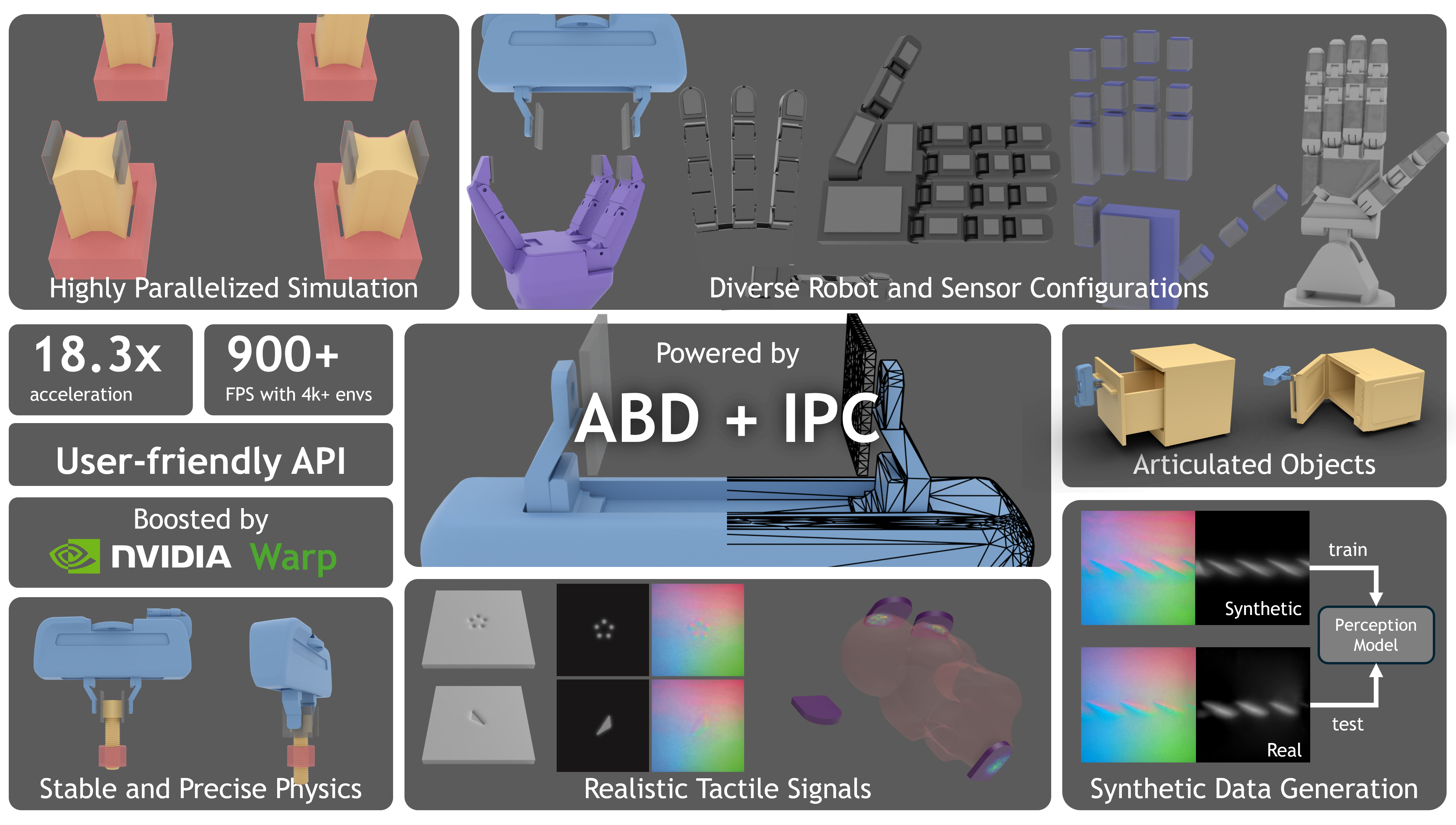
[NeurIPS25] Taccel: Scaling Up Vision-based Tactile Robotics via High-performance GPU Simulation
Spotlight
Yuyang Li
⚖️
equal contributor
,
Wenxin Du
⚖️
equal contributor
,
Chang Yu
⚖️
equal contributor
,
Puhao Li
,
Zihang Zhao
,
Tengyu Liu
,
Chenfanfu Jiang
✉️
corresponding author
,
Yixin Zhu
✉️
corresponding author
,
Siyuan Huang
✉️
corresponding author
Cite
ArXiv
pdf
code
video
web
NVIDIA Tech Blog
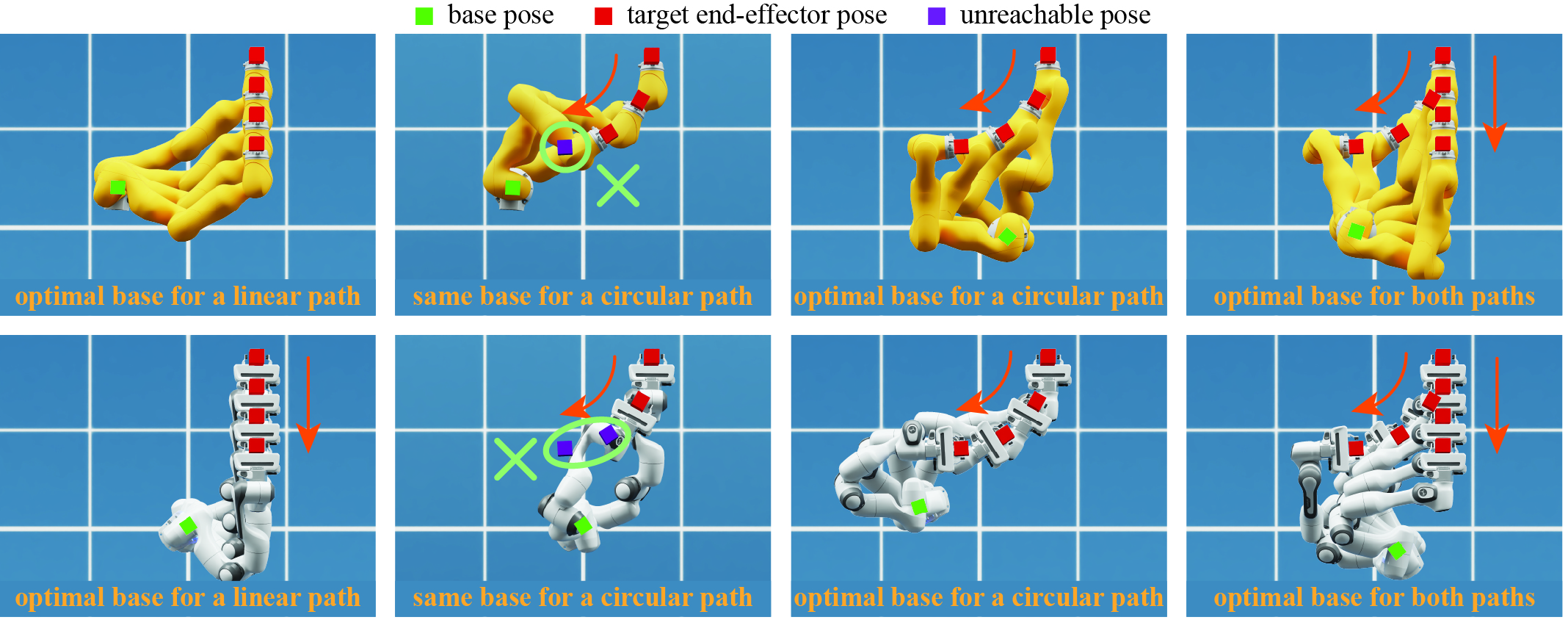
[RA-L25] B*: Efficient and Optimal Base Placement for Fixed-Base Manipulators
Zihang Zhao
⚖️
equal contributor
,
Leiyao Cui
⚖️
equal contributor
,
Sirui Xie
⚖️
equal contributor
,
Saiyao Zhang
,
Zhi Han
,
Lecheng Ruan
,
Yixin Zhu
✉️
corresponding author
Cite
IEEE
ArXiv
pdf
code
web
[Nature Mach. Intell.25] Embedding high-resolution touch across robotic hands enables adaptive human-like grasping
Zihang Zhao
⚖️
equal contributor
,
Wanlin Li
⚖️
equal contributor
,
Yuyang Li
⚖️
equal contributor
,
Tengyu Liu
⚖️
equal contributor
,
Boren Li
,
Meng Wang
,
Kai Du
,
Hangxin Liu
✉️
corresponding author
,
Yixin Zhu
✉️
corresponding author
,
Qining Wang
,
Kaspar Althoefer
✉️
corresponding author
,
Song-Chun Zhu
Cite
Nature
Nature Sensors' Collection
Science Robotics Editors' Choice
pdf
video
poster
人民日报
光明日报
光明日报
光明少年
科技日报
TechXplore
TechXplore
Your browser does not support the video tag.
[T-RO25] Tac-Man: Tactile-Informed Prior-Free Manipulation of Articulated Objects
Zihang Zhao
⚖️
equal contributor
,
Yuyang Li
⚖️
equal contributor
,
Wanlin Li
,
Zhenghao Qi
,
Lecheng Ruan
✉️
corresponding author
,
Yixin Zhu
✉️
corresponding author
,
Kaspar Althoefer
Cite
IEEE
ArXiv
pdf
code
video
web
poster
TechXplore
[RA-L24] MiniTac: An Ultra-Compact 8 mm Vision-Based Tactile Sensor for Enhanced Palpation in Robot-Assisted Minimally Invasive Surgery
Wanlin Li
⚖️
equal contributor
,
Zihang Zhao
⚖️
equal contributor
,
Leiyao Cui
⚖️
equal contributor
,
Weiyi Zhang
⚖️
equal contributor
,
Hangxin Liu
,
Li-an Li
✉️
corresponding author
,
Yixin Zhu
✉️
corresponding author
Cite
IEEE
ArXiv
pdf
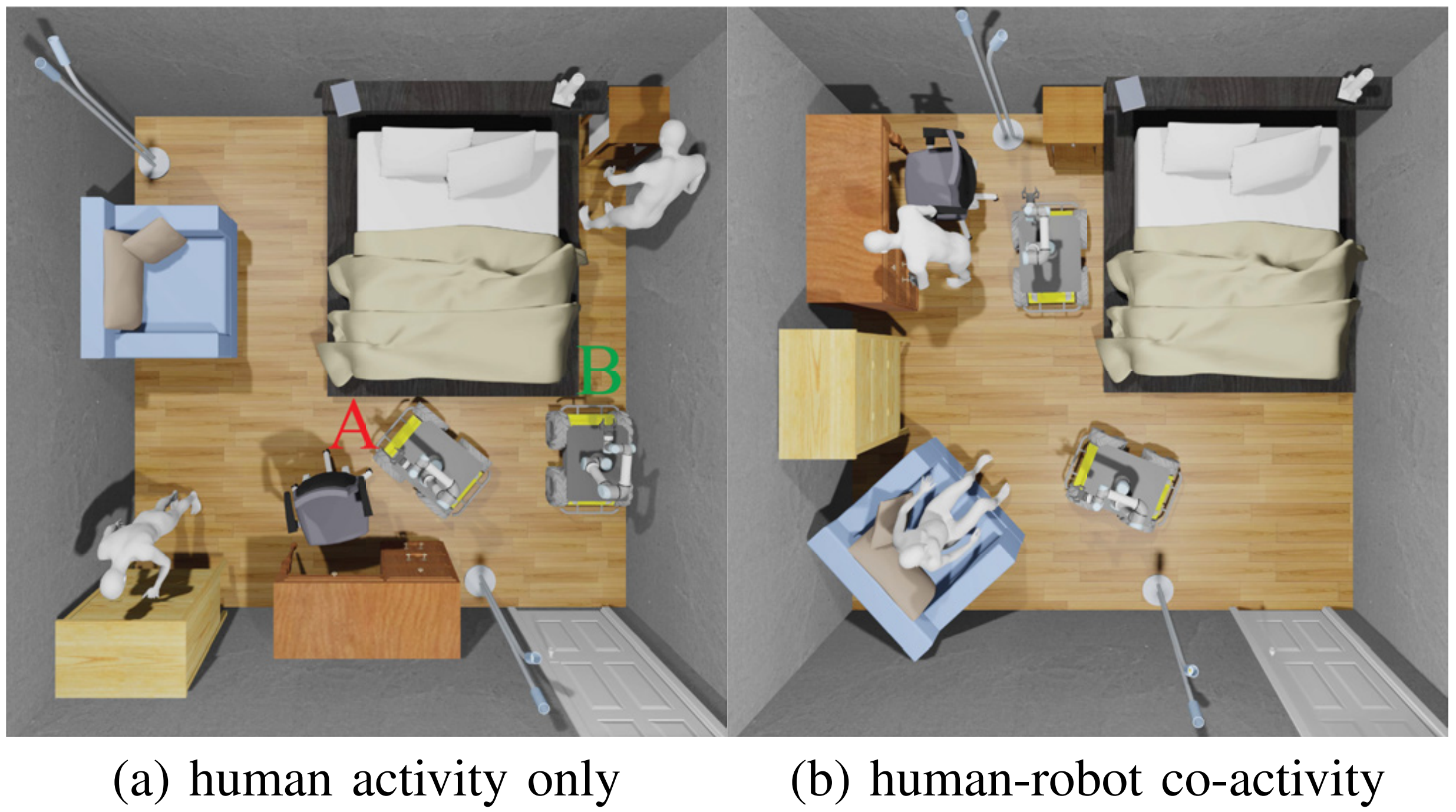
[ICRA23] Rearrange indoor scenes for human-robot co-activity
Weiqi Wang
⚖️
equal contributor
,
Zihang Zhao
⚖️
equal contributor
,
Ziyuan Jiao
⚖️
equal contributor
,
Yixin Zhu
✉️
corresponding author
,
Song-Chun Zhu
,
Hangxin Liu
✉️
corresponding author
Cite
IEEE
ArXiv
pdf
code
video
web
Next »